defset_seeds(seed=1234):"""Set seeds for reproducibility."""np.random.seed(seed)random.seed(seed)torch.manual_seed(seed)torch.cuda.manual_seed(seed)torch.cuda.manual_seed_all(seed)# multi-GPU
12
# Set seeds for reproducibilityset_seeds(seed=SEED)
12345678
# Set devicecuda=Truedevice=torch.device("cuda"if(torch.cuda.is_available()andcuda)else"cpu")torch.set_default_tensor_type("torch.FloatTensor")ifdevice.type=="cuda":torch.set_default_tensor_type("torch.cuda.FloatTensor")print(device)
cuda
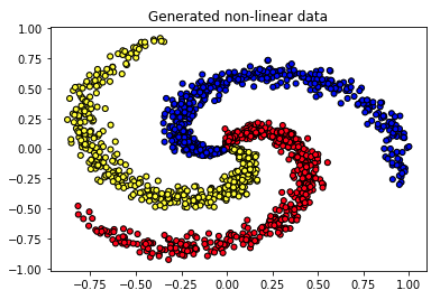
Load data
We'll use the same spiral dataset from previous lessons to demonstrate our utilities.
deftrain_val_test_split(X,y,train_size):"""Split dataset into data splits."""X_train,X_,y_train,y_=train_test_split(X,y,train_size=TRAIN_SIZE,stratify=y)X_val,X_test,y_val,y_test=train_test_split(X_,y_,train_size=0.5,stratify=y_)returnX_train,X_val,X_test,y_train,y_val,y_test
Next we'll define a LabelEncoder to encode our text labels into unique indices. We're not going to use scikit-learn's LabelEncoder anymore because we want to be able to save and load our instances the way we want to.
classLabelEncoder(object):"""Label encoder for tag labels."""def__init__(self,class_to_index={}):self.class_to_index=class_to_indexor{}# mutable defaults ;)self.index_to_class={v:kfork,vinself.class_to_index.items()}self.classes=list(self.class_to_index.keys())def__len__(self):returnlen(self.class_to_index)def__str__(self):returnf"<LabelEncoder(num_classes={len(self)})>"deffit(self,y):classes=np.unique(y)fori,class_inenumerate(classes):self.class_to_index[class_]=iself.index_to_class={v:kfork,vinself.class_to_index.items()}self.classes=list(self.class_to_index.keys())returnselfdefencode(self,y):encoded=np.zeros((len(y)),dtype=int)fori,iteminenumerate(y):encoded[i]=self.class_to_index[item]returnencodeddefdecode(self,y):classes=[]fori,iteminenumerate(y):classes.append(self.index_to_class[item])returnclassesdefsave(self,fp):withopen(fp,"w")asfp:contents={'class_to_index':self.class_to_index}json.dump(contents,fp,indent=4,sort_keys=False)@classmethoddefload(cls,fp):withopen(fp,"r")asfp:kwargs=json.load(fp=fp)returncls(**kwargs)
We need to standardize our data (zero mean and unit variance) so a specific feature's magnitude doesn't affect how the model learns its weights. We're only going to standardize the inputs X because our outputs y are class values. We're going to compose our own StandardScaler class so we can easily save and load it later during inference.
# Standardize the data (mean=0, std=1) using training dataX_scaler=StandardScaler()X_scaler.fit(X_train)
1234
# Apply scaler on training and test data (don't standardize outputs for classification)X_train=X_scaler.scale(X_train)X_val=X_scaler.scale(X_val)X_test=X_scaler.scale(X_test)
123
# Check (means should be ~0 and std should be ~1)print(f"X_test[0]: mean: {np.mean(X_test[:,0],axis=0):.1f}, std: {np.std(X_test[:,0],axis=0):.1f}")print(f"X_test[1]: mean: {np.mean(X_test[:,1],axis=0):.1f}, std: {np.std(X_test[:,1],axis=0):.1f}")
classDataset(torch.utils.data.Dataset):def__init__(self,X,y):self.X=Xself.y=ydef__len__(self):returnlen(self.y)def__str__(self):returnf"<Dataset(N={len(self)})>"def__getitem__(self,index):X=self.X[index]y=self.y[index]return[X,y]defcollate_fn(self,batch):"""Processing on a batch."""# Get inputsbatch=np.array(batch)X=np.stack(batch[:,0],axis=0)y=batch[:,1]# CastX=torch.FloatTensor(X.astype(np.float32))y=torch.LongTensor(y.astype(np.int32))returnX,ydefcreate_dataloader(self,batch_size,shuffle=False,drop_last=False):returntorch.utils.data.DataLoader(dataset=self,batch_size=batch_size,collate_fn=self.collate_fn,shuffle=shuffle,drop_last=drop_last,pin_memory=True)
We don't really need the collate_fn here but we wanted to make it transparent because we will need it when we want to do specific processing on our batch (ex. padding).
1 2 3 4 5 6 7 8 91011
# Create datasetstrain_dataset=Dataset(X=X_train,y=y_train)val_dataset=Dataset(X=X_val,y=y_val)test_dataset=Dataset(X=X_test,y=y_test)print("Datasets:\n"f" Train dataset:{train_dataset.__str__()}\n"f" Val dataset: {val_dataset.__str__()}\n"f" Test dataset: {test_dataset.__str__()}\n""Sample point:\n"f" X: {train_dataset[0][0]}\n"f" y: {train_dataset[0][1]}")
Datasets:
Train dataset: <Dataset(N=1050)>
Val dataset: <Dataset(N=225)>
Test dataset: <Dataset(N=225)>
Sample point:
X: [-1.47355106 -1.67417243]
y: 0
So far, we used batch gradient descent to update our weights. This means that we calculated the gradients using the entire training dataset. We also could've updated our weights using stochastic gradient descent (SGD) where we pass in one training example one at a time. The current standard is mini-batch gradient descent, which strikes a balance between batch and SGD, where we update the weights using a mini-batch of n (BATCH_SIZE) samples. This is where the DataLoader object comes in handy.
So far we've been running our operations on the CPU but when we have large datasets and larger models to train, we can benefit by parallelizing tensor operations on a GPU. In this notebook, you can use a GPU by going to Runtime > Change runtime type > Select GPU in the Hardware accelerator dropdown. We can what device we're using with the following line of code:
123
# Set CUDA seedstorch.cuda.manual_seed(SEED)torch.cuda.manual_seed_all(SEED)# multi-GPU
# Initialize modelmodel=MLP(input_dim=INPUT_DIM,hidden_dim=HIDDEN_DIM,dropout_p=DROPOUT_P,num_classes=NUM_CLASSES)model=model.to(device)# set deviceprint(model.named_parameters)
So far we've been writing training loops that train only using the train data split and then we perform evaluation on our test set. But in reality, we would follow this process:
Train using mini-batches on one epoch of the train data split.
Evaluate loss on the validation split and use it to adjust hyperparameters (ex. learning rate).
After training ends (via stagnation in improvements, desired performance, etc.), evaluate your trained model on the test (hold-out) data split.
We'll create a Trainer class to keep all of these processes organized.
The first function in the class is train_step which will train the model using batches from one epoch of the train data split.
1 2 3 4 5 6 7 8 910111213141516171819202122
deftrain_step(self,dataloader):"""Train step."""# Set model to train modeself.model.train()loss=0.0# Iterate over train batchesfori,batchinenumerate(dataloader):# Stepbatch=[item.to(self.device)foriteminbatch]# Set deviceinputs,targets=batch[:-1],batch[-1]self.optimizer.zero_grad()# Reset gradientsz=self.model(inputs)# Forward passJ=self.loss_fn(z,targets)# Define lossJ.backward()# Backward passself.optimizer.step()# Update weights# Cumulative Metricsloss+=(J.detach().item()-loss)/(i+1)returnloss
Next we'll define the eval_step which will be used for processing both the validation and test data splits. This is because neither of them require gradient updates and display the same metrics.
defeval_step(self,dataloader):"""Validation or test step."""# Set model to eval modeself.model.eval()loss=0.0y_trues,y_probs=[],[]# Iterate over val batcheswithtorch.inference_mode():fori,batchinenumerate(dataloader):# Stepbatch=[item.to(self.device)foriteminbatch]# Set deviceinputs,y_true=batch[:-1],batch[-1]z=self.model(inputs)# Forward passJ=self.loss_fn(z,y_true).item()# Cumulative Metricsloss+=(J-loss)/(i+1)# Store outputsy_prob=F.softmax(z).cpu().numpy()y_probs.extend(y_prob)y_trues.extend(y_true.cpu().numpy())returnloss,np.vstack(y_trues),np.vstack(y_probs)
The final function is the predict_step which will be used for inference. It's fairly similar to the eval_step except we don't calculate any metrics. We pass on the predictions which we can use to generate our performance scores.
1 2 3 4 5 6 7 8 910111213141516171819
defpredict_step(self,dataloader):"""Prediction step."""# Set model to eval modeself.model.eval()y_probs=[]# Iterate over val batcheswithtorch.inference_mode():fori,batchinenumerate(dataloader):# Forward pass w/ inputsinputs,targets=batch[:-1],batch[-1]z=self.model(inputs)# Store outputsy_prob=F.softmax(z).cpu().numpy()y_probs.extend(y_prob)returnnp.vstack(y_probs)
LR scheduler
As our model starts to optimize and perform better, the loss will reduce and we'll need to make smaller adjustments. If we keep using a fixed learning rate, we'll be overshooting back and forth. Therefore, we're going to add a learning rate scheduler to our optimizer to adjust our learning rate during training. There are many schedulers schedulers to choose from but a popular one is ReduceLROnPlateau which reduces the learning rate when a metric (ex. validation loss) stops improving. In the example below we'll reduce the learning rate by a factor of 0.1 (factor=0.1) when our metric of interest (self.scheduler.step(val_loss)) stops decreasing (mode="min") for three (patience=3) straight epochs.
1 2 3 4 5 6 7 8 91011
# Initialize the LR schedulerscheduler=torch.optim.lr_scheduler.ReduceLROnPlateau(optimizer,mode="min",factor=0.1,patience=3)...train_loop():...# Stepstrain_loss=trainer.train_step(dataloader=train_dataloader)val_loss,_,_=trainer.eval_step(dataloader=val_dataloader)self.scheduler.step(val_loss)...
Early stopping
We should never train our models for an arbitrary number of epochs but instead we should have explicit stopping criteria (even if you are bootstrapped by compute resources). Common stopping criteria include when validation performance stagnates for certain # of epochs (patience), desired performance is reached, etc.
1 2 3 4 5 6 7 8 910
# Early stoppingifval_loss<best_val_loss:best_val_loss=val_lossbest_model=trainer.model_patience=patience# reset _patienceelse:_patience-=1ifnot_patience:# 0print("Stopping early!")break
Training
Let's put all of this together now to train our model.
classTrainer(object):def__init__(self,model,device,loss_fn=None,optimizer=None,scheduler=None):# Set paramsself.model=modelself.device=deviceself.loss_fn=loss_fnself.optimizer=optimizerself.scheduler=schedulerdeftrain_step(self,dataloader):"""Train step."""# Set model to train modeself.model.train()loss=0.0# Iterate over train batchesfori,batchinenumerate(dataloader):# Stepbatch=[item.to(self.device)foriteminbatch]# Set deviceinputs,targets=batch[:-1],batch[-1]self.optimizer.zero_grad()# Reset gradientsz=self.model(inputs)# Forward passJ=self.loss_fn(z,targets)# Define lossJ.backward()# Backward passself.optimizer.step()# Update weights# Cumulative Metricsloss+=(J.detach().item()-loss)/(i+1)returnlossdefeval_step(self,dataloader):"""Validation or test step."""# Set model to eval modeself.model.eval()loss=0.0y_trues,y_probs=[],[]# Iterate over val batcheswithtorch.inference_mode():fori,batchinenumerate(dataloader):# Stepbatch=[item.to(self.device)foriteminbatch]# Set deviceinputs,y_true=batch[:-1],batch[-1]z=self.model(inputs)# Forward passJ=self.loss_fn(z,y_true).item()# Cumulative Metricsloss+=(J-loss)/(i+1)# Store outputsy_prob=F.softmax(z).cpu().numpy()y_probs.extend(y_prob)y_trues.extend(y_true.cpu().numpy())returnloss,np.vstack(y_trues),np.vstack(y_probs)defpredict_step(self,dataloader):"""Prediction step."""# Set model to eval modeself.model.eval()y_probs=[]# Iterate over val batcheswithtorch.inference_mode():fori,batchinenumerate(dataloader):# Forward pass w/ inputsinputs,targets=batch[:-1],batch[-1]z=self.model(inputs)# Store outputsy_prob=F.softmax(z).cpu().numpy()y_probs.extend(y_prob)returnnp.vstack(y_probs)deftrain(self,num_epochs,patience,train_dataloader,val_dataloader):best_val_loss=np.infforepochinrange(num_epochs):# Stepstrain_loss=self.train_step(dataloader=train_dataloader)val_loss,_,_=self.eval_step(dataloader=val_dataloader)self.scheduler.step(val_loss)# Early stoppingifval_loss<best_val_loss:best_val_loss=val_lossbest_model=self.model_patience=patience# reset _patienceelse:_patience-=1ifnot_patience:# 0print("Stopping early!")break# Loggingprint(f"Epoch: {epoch+1} | "f"train_loss: {train_loss:.5f}, "f"val_loss: {val_loss:.5f}, "f"lr: {self.optimizer.param_groups[0]['lr']:.2E}, "f"_patience: {_patience}")returnbest_model
Many tutorials never show you how to save the components you created so you can load them for inference.
1
frompathlibimportPath
12345678
# Save artifactsdir=Path("mlp")dir.mkdir(parents=True,exist_ok=True)label_encoder.save(fp=Path(dir,"label_encoder.json"))X_scaler.save(fp=Path(dir,"X_scaler.json"))torch.save(best_model.state_dict(),Path(dir,"model.pt"))withopen(Path(dir,'performance.json'),"w")asfp:json.dump(performance,indent=2,sort_keys=False,fp=fp)